Для функционирования базового автопилота необходимо установить на рулевую колонку транспортного средства сервопривод рулевого управления Agroglobal.
В меню Настройка системы перейдите на вкладку Автопилот, выберите интерисующий профиль и нажмите Редактировать.
Во вкладке Подключение проверьте указание значения рабочего порта «CAN2» и перейдите на вкладку Данные для проверки заполнения полей оценочными данными.
Если устройства будут правильно подключены, то информация о принимаемых данных будет отображаться в правой части вкладки Подключение.
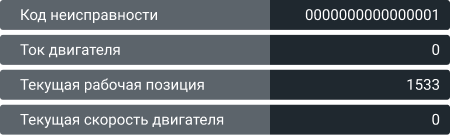
Во время поворота оси сервопривода рулевого управления Agroglobal AGN KY 170C будут заполняться поля Текущая скорость двигателя, Текущая рабочая позиция и Ток двигателя переменными значениями. Наличие в поле Код неисправности значения - 0000000000000001 сигнализирует о правильном функционировании сервопривода рулевого управления.
Применение инерциальных систем в качестве датчика, регистрирующего изменение положения поворота колеса, позволяет исключить из системы механические датчики.
В качестве датчика положения применяется CNIMU101ST47.002 Инер-циальный датчик ST 101 с монтажным комплектом.
Перед монтажом СА необходимо определится с составом и расположением каждого датчика.
Проверку функционирования датчика положения колеса необходимо выполнить до монтажа на транспортном средстве.
При изменении положения в пространстве инерциального датчика по-ложения колеса, будут меняться показания значений в полях MINS колеса и Угловая скорость датчика на колесе (приведены ниже).
Показатель угловой величины получаемые от датчика положения дол-жен находиться в диапазоне от -0.1 до +0.1.
|-|
| |
|
|Поля отображения данных датчика положения колеса
|-|
|  |
|
|Поле отображения угловых величин датчиков положения
Для настройки системы базового автопилота перейдите на вкладку Конфигурация.